2020-05-07 12:36:00
不到现场,照样看最干货的学术报告!
嗨,大家好。这里是学术报告专栏,读芯术小编不定期挑选并亲自跑会,为大家奉献科技领域最优秀的学术报告,为同学们记录报告干货,并想方设法搞到一手的PPT和现场视频——足够干货,足够新鲜!话不多说,快快看过来,希望这些优秀的青年学者、专家杰青的学术报告 ,能让您在业余时间的知识阅读更有价值。
人工智能论坛如今浩如烟海,有硬货、有干货的讲座却百里挑一。“AI未来说·青年学术论坛”系列讲座由中国科学院大学主办,百度全力支持,读芯术、paperweekly作为合作自媒体。承办单位为中国科学院大学学生会,协办单位为中国科学院计算所研究生会、网络中心研究生会、人工智能学院学生会、化学工程学院学生会、公共政策与管理学院学生会、微电子学院学生会。2020年4月26日,第14期“AI未来说·青年学术论坛”深度学习线上专场论坛以“线上平台直播+微信社群图文直播”形式举行。北京航空航天大学孙钰带来报告《昆虫目标检测技术》。
孙钰,北京航空航天大学大学网络空间安全学院副教授,北京林业大学信息学院兼职硕士导师。2018及2019年C4-AI创意赛一等奖团队指导教师,同时获优秀指导教师奖。2019年全国大学生物联网设计竞赛一等奖团队指导教师。主持教育部-谷歌校企协同育人项目两项,教育部-百度校企协同育人项目一项。主要研究方向为智能物联网AIoT、生物特征识别、智能安全。
报告内容:以2018年C4-AI创意赛一等奖作品《智能虫情监测物联网》为例,介绍人工智能+生态的典型项目,讲解针对林业害虫红脂大小蠹的目标检测技术,内容覆盖数据采集、模型设计、飞桨软硬件选型、物联网部署等完整流程。

昆虫目标检测技术
孙钰老师主要就2018年的C4-AI创意赛一等奖作品《智能虫情监测物联网的解析》进行了分享,主要包括三个部分:研究意义、系统设计、创新点总结,每一个部分又包括了作品介绍、得分点分析以及飞桨资源指南。为了便于大家理解,孙老师形象地解释道:如果把参赛比作神经网络的训练,作品介绍就是引领大家做选项预测,得分点分析帮大家计算损失,最终根据飞桨资源更新参赛的参数。
首先,孙钰老师讲解了该作品的研究意义。其研究对象是红脂大小蠹,它是一种危害了35种松科植物,发生面积超过50万公顷的入侵害虫。红脂大小蠹之所以难于防治就是因为它的隐蔽性,它是一种蛀干害虫,从外观上看只能看到一些虫粪,只有扒开树皮才能看到里边的害虫。在扬飞期对红脂大小蠹进行数量和种群的统计是进行准确预报的重要环节,在林学专业的工具叫信息素诱捕器。传统监测方式还是人工上山的监测方式,需要专业工作人员定期上山回收每一个诱捕器点清里边的诱捕数,这项工作工作量非常大的,因此急需自动化监测工具来提高虫害预警及防治准确率和效率。这部分的得分点是选题抓住了人工智能+X,比赛采用开放性命题。围绕行业需求,孙钰老师的课题选择了重大入侵害虫红脂大小蠹,并做到人工智能+生态的结合。孙钰老师建议同学们在进行比赛时,要学会组建跨专业的团队,以他的团队为例,团队队员来自林业信息化、人工智能和物联网专业,从而从组队上保证了人工智能+生态的组合。此外,关于选题方面,孙钰老师提到,飞桨提供了很多的参考案例,推荐同学们到百度AI开放平台官网去查询,比如说高尔夫球场的监测,更低地块的识别等等,供大家启发思维。

接下来,孙钰老师从技术路线和效果展示两方面详细地介绍了系统设计。他们使用了飞桨框架,训练了一个目标检测模型,这个模型被部署到了嵌入式设备上,嵌入式设备上除了有CPU还有摄像头,可以在诱捕器里采集图像、拍照、调用模型识别,识别完以后识别结果会通过物联网传输到云端服务器上,这样在云端可以在百度地图上看到森林各处的情况。
孙钰老师还为大家介绍了零基础入门飞桨的方法:一般来说零基础预计需要3—4周的时间。首先要有一周学习python,然后可以观看百度云智学院的****“90分钟飞桨快速上手”,之后可以转为学习百度官方的文字教程,因为只有百度飞桨目前是全中文资料,孙钰老师推荐从中文资料入手。学完之后即使没有GPU资源,也可以用AI Studio实际演练。

之后,孙钰老师详细讲解了参赛作品。第一步,团队对诱捕器进行了电子化的改造。,首先在诱捕器收集杯中集成LED灯带用来补充光照,然后要集成摄像头并调整焦距,以此在诱捕器底部得到清晰的成像。图像识别主要有两个挑战:其一,目标姿态各异,而且有些是破碎的;其二,时间一长诱捕器会落入杂质,导致背景非常嘈杂。借助诱捕器的电子化改造,该团队结合了应用场景并且自行获取了相关数据。在数据标注时,该团队选择了LabeIImg。根据林学院的建议,孙钰老师团队用边界框标识出了红脂大小蠹的位置。之后,团队对数据集进行划分,划分为训练集、验证集和测试集。这样采集的图片、标注格式尽可能利用飞桨已经实现的DataRader,可以大幅度减少编程工作量。

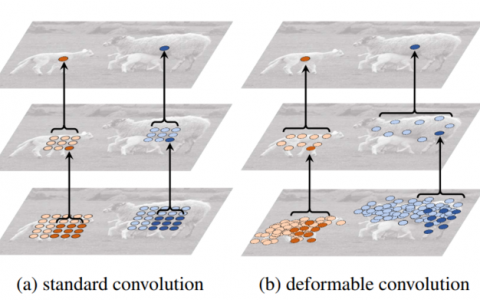
团队站在巨人的肩膀上,以飞桨模型SSD模型为基础,充分利用已有DateReader、模型定义、预训练模型以及测试训练代码。但是最初SSD是面向PASCAL VOC等通用数据集,它的任务是检出像猫一样的通用物体,而将它转移到专业小目标精细分类多重检测的时候,需要对算法进行优化。首先需要对运算量进行精简。这部分主要体现对骨干CNN运算量的精简,降低运算量方式主要是MobileNet的深度可分离卷积,用深度可分离卷积替代标准卷积,可以大幅压缩CNN阶段的运算量。第二,对于定位进行优化。蠹虫的体积非常小,这时候需要改变SSD模型超参数,把输出特征图尺寸扩大一倍,大小到64×64,团队采用了特征金字塔把高层特征向下融合,为低层抽象特征图补足语义信息,两个高分辨率的特征图上输出分类和定位结果。最终是对于品种细分头部优化,这里增加了卷积的层数,并且加入了残差连接,这样一来模型不仅可以找出蠹虫在哪儿,而且知道蠹虫到底是不是有危害的红脂大小蠹。
最后团队把模型变成了AIoT中的模型。因为林区移动信号差,无法上传高清图片,因此团队把模型下发到每一个诱捕器上,摄像头定时拍摄诱捕器中蠹虫影像,交给身边嵌入式去识别。在上报过程中,仅需要通过轻量级MQTT协议上报识别结果就可以,避免了在林区网络下上传高清图片,这样就把传统没有任何电子设备的诱捕器变成了智能终端。林区各个诱捕器在定时拍摄识别以后会将结果通过MQTT协议上报,MQTT中转器会把每个客户端消息发布到订阅者,订阅者是林草局监控服务器,服务器收到之后会把数据写入数据库,然后在前端地图更新,这样一来林业专家就可以在远程看到林区各个点实时的虫情。这方面的得分点是把模型部署到智能物联网中。关于将模型转化为物联网,孙钰老师介绍了两大工具:一个是硬件EdgeBoard,EdgeBoard上运行的是轻量级深度学习框架Paddle Lite,可以把它想成ARM版的飞桨;向嵌入式部署模型还需要专门的部署软件Paddle Lite,模型导出后需要压缩才能让Paddle Lite运行。
模型设计好之后,在云端的效果是这样的:打开百度地图,每一个诱捕器是一个气泡,点开可以看到里边采集时间和数量,如果虫情严重气泡就会变成红色。云端对应得分点是可视化应用展示。然后孙钰老师分析了作品的市场应用前景,这套设备具有低人力、高效率、低成本的特点,有比较好的应用前景。
最后,孙钰老师总结了该作品的创新点。首先是强化了原始SSD的细分能力,让它可以识别诱捕器中任意姿态的小目标蠹虫,检出唯一有危害的红脂大小蠹。第二精简原始SSD模型的运算量,并且用Paddle Lite把它部署在潜入式开发板上,实现了林区本地识别。第三是使用MQTT协议汇聚各个诱捕器虫情,然后汇聚到云端进行可视化的展示,为林区制定防治措施提供数据支撑。
报告结束,孙钰老师不忘给大家分享学习飞桨的心得。他提到,飞桨官方提供了非常好的指南,大致可以分为三个部分。首先是入门教程,它的难度相当于小学语文课本。然后是实验案例,孙钰老师推荐大家选计算机视觉、自然语言来实际练兵,练兵过程中碰到不知道的API,可以到API reference查字典。经过读教材、做实验、查字典的过程,大家可以通过案例快速提升人工智能技术。对于中国开发者来说,一个额外福利是可以向飞桨开发者直接提问,即在GitHub发出issue。在提问的时候直接写中文就可以,百度工程师一般会在一两天的时间给出非常及时的回复。
本站文章如无特殊说明,均为本站原创,如若转载,请注明出处:北航孙钰:昆虫目标检测技术 - Python技术站
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫