2020-09-21
参考:https://blog.csdn.net/piaoxuezhong/article/details/78985024
本篇主要汇总一下图像分割领域的一些常用方法及其优缺点。
图像分割概述:
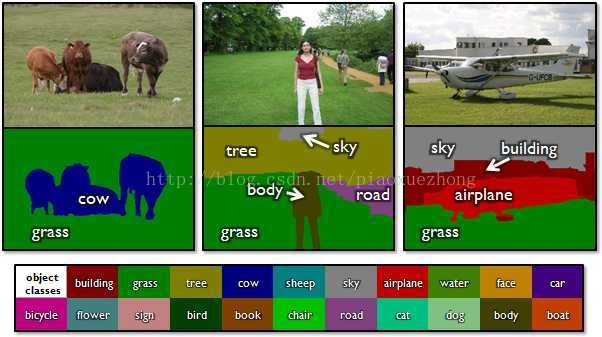
图像分割是指将一幅图像分成若干互不重叠的子区域,使得每个子区域具有一定的相似性、而不同子区域有较为明显的差异。图像分割是图像识别、场景理解、物体检测等任务的基础预处理工作。常用的图像分割方法有:基于阈值的分割;基于边缘的分割;基于区域的分割;基于图论的分割;基于能量泛函的分割;基于小波的分割;基于神经网络的分割等。
基于阈值的分割:
阈值分割直接对图像灰度信息阈值化处理,用一个或几个阈值将图像灰度直方图进行分类,将灰度值在同一个灰度类内的像素归为同一个物体。直接利用图像灰度特性进行分割,实现简单、实用性强;但是当图像灰度差异不明显、或各物体的灰度范围值有大部分重叠现象时,难以得到准确的分割结果。
常见的基于阈值的分割方法有:固定阈值分割,直方图双峰法,OTSU法等,可参见博客。
基于边缘的分割方法:
基于区域的分割方法:
基于区域的分割方法考虑图像的空间信息,如图像灰度、纹理、颜色和像素统计特性等,按照特征相似性将目标对象划分为不同区域。常见的区域分割方法有:区域生长法、分裂合并法和分水岭分割方法。
区域生长法的基本思想是:根据一定的相似性原则,满足这一原则的像素合并起来构成区域,关键点是生长种子和生长准则的选取;而分裂合并法恰恰相反,从整个图像开始分裂,后合并得到各个区域;分水岭分割方法是基于拓扑理论的数学形态学分割方法,基本思想是将图像看作测地学上的拓扑地貌,像素的灰度值表示该点的海拔,一个局部极小值及其影响区域称为集水盆,集水盆的边界则形成分水岭。
基于图论的分割方法:
基于图论的方法是一种自顶向下的全局分割方法,主要思想是将整幅图像映射为一幅带权无向图 G=(V,E), V是顶点的集合,E是边的集合,每个像素对应图中一个顶点,像素之间的相邻关系对应图的边,像素特征之间的相似性或差异性表示为边的权值。将图像分割问题转换成图的划分问题,通过对目标函数的最优化求解,完成图像分割过程。
基于图论的分割方法有:Normalized Cuts算法,Graph Cuts算法,Superpixel lattice算法等,可以参见博客1,博客2
基于能量泛函的分割方法:
该类方法主要是在主动轮廓模型(active contour model)基础上发展出来的算法,其基本思想是使用连续曲线表示目标边缘,并定义一个能量泛函使其自变量包括边缘曲线,将分割过程转变为求解能量泛函最小值的过程。
基于小波的分割方法:
在图像分割中,波变换是一种多尺度多通道分析工具,较适合对图像进行多尺度边缘检测。小波变换的极大值点对应于信号的突变点,在二维空间中,小波变换适用于检测图像的局部奇异性,通过检测极大值点来确定图像的边缘。图像边缘和噪声在不同尺度上具有不同的特性,在不同的尺度上检测到的边缘,在定位精度与抗噪性能上是互补的。在大尺度上,边缘比较稳定,噪声不敏感,但由于采样移位的影响,边缘的定位精度较差;在小尺度上,边缘细节信息比较丰富,边缘定位精度较高,但对噪声比较敏感。因此,多尺度边缘提取可以综合两者的优势。
基于神经网络的分割方法:
基于神经网络分割方法的基本思想是:通过训练多层感知机来得到线性决策函数,后用决策函数对象素进行分类来达到分割的目的。当前,深度学习如火如荼,基于深度神经网络的图像分割方法也不断涌现。具体可参见参考4和参考5.
目标分割、目标识别、目标检测和目标跟踪之间的关系:
典型的技术路线是:目标分割 ——>目标检测 ——>目标识别 ——>目标跟踪
(1)目标分割,Target Segmentation,data/image segmentation的一种。
假定数据是图像,任务是把目标分割出来。对于一般的光学图像,是要提取哪一些像素是用于表述目标的。问题可以看成是分类问题,即把每一个像素标签化,找出感兴趣的那一类标签对应的像素;也可以是聚类问题,即不知道像素的标签,但通过某些特征可以对像素进行分类区分开。

(2)目标识别,Target Recognition。
这是一个基于分类的识别问题,即在所有的给定数据中,找出哪些是目标。这个分类的层面往往不是针对像素,而是给定的一些分类,或定义的对象,或图像本身。
(3)目标检测,Target Detection。
以雷达检测系统为例,需要从随机又充满干扰和噪音的信号中,找到有信息的特征。最简单的方式是对一段雷达回波设置阈值,高于阈值的部分认为是探测到了高速大面积飞行器之类的高回波目标。
(4)目标追踪,Target Tracking。
这个任务涉及的数据一般是时间序列,完成这个任务首先要目标定位。常见的情况是目标被定位以后,算法需要在后面的序列数据中,快速高效地对目标进行再定位。为了避免不必要的重复计算,可以充分利用时间序列的相关性,可能涉及到一些几何变换(旋转,缩放等),运动伪影处理等问题。

参考:
- 《图像分割方法及性能评价综述》[J]
- 《图像分割方法综述研究》[J]计算机应用研究
- 图像分割 传统方法 整理
- 三年来,CNN在图像分割领域经历了怎样的技术变革?
- CNN在基于弱监督学习的图像分割中的应用
- 图像识别中,目标分割、目标识别、目标检测和目标跟踪这几个方面区别是什么?
- 计算机视觉中,目前有哪些经典的目标跟踪算法?
本站文章如无特殊说明,均为本站原创,如若转载,请注明出处:图像分割算法及与目标检测、目标识别、目标跟踪的关系 - Python技术站
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 